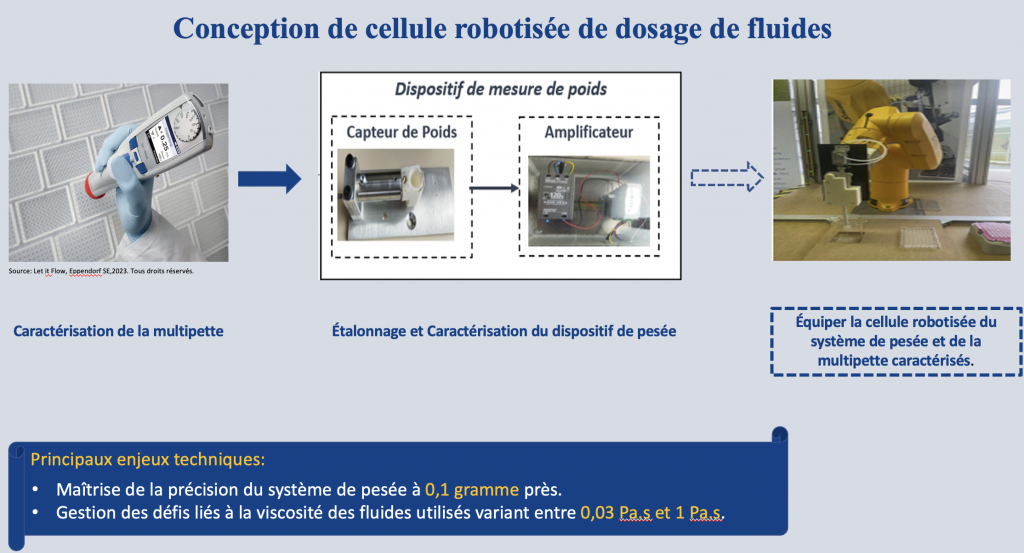
Ce projet a pour but de concevoir et mettre en place une cellule robotisée de démonstration destinée au remplissage automatique au du 10ème de gramme de tubes de screening par des fluides faiblement à fortement visqueux. La cellule sera composée de 3 dispositifs principaux : un robot STAÜBLI à 4 axes destiné à manipuler les tubes de screening. La seconde dispositif assurera le remplissage en étant capable de doser précisément des fluides de viscosités variables. Il sera asservi en temps réel à un système de pesée précis et répétable. Ces deux derniers systèmes seront à concevoir et réaliser. La loi de de régulation sera élaborée et optimisée afin d’obtenir le remplissage voulu. Enfin, un automate assurera la communication entre le robot et le dispositif de remplissage.